Chapter 1
1.1 Motivation
Through the use of modern scanning and rendering
technologies, it has become theoretically possible to reconstruct and render
the anatomy of the human body at arbitrary levels of detail. However, at present the vast majority
of applications utilizing this technology exist solely as research prototypes
working on toy models or as vast modeling applications such as Maya[2] or 3D
Studio MAX[1], designed with animators and game designers, rather than the
anatomist, in mind. The goal of
this thesis is to leverage and improve existing rendering and model
construction technologies to create a powerful and easy-to-use suite of
software tools designed to meet the needs of anatomists and students who wish
to recreate digital models of the human body. Our software is capable of creating 3D models based on
image data from the human body and designing complex scenes using these
models. These scenes may later be
used by students or anatomists to explore the structure of the human body.
Our pipeline for creating 3D scenes begins with the BodyGen program. At a high level, this tool allows users to create and save 3D model files in .obj format, a common 3D model description format, by specifying the model’s contours through a set of image data. With BodyView, a user can combine multiple models created with BodyGen to design complex scenes of the human body, e.g. combining many models from the brain together to form a scene depicting the human head. These scenes are then saved in VRML format. (See figure 1.1.)
1.2 Distinguishing
Features of BodyGen/BodyView
Numerous
pieces of commercial software currently exist to create 3D models and scenes
based upon those models. The
BodyGen and BodyView programs, however, contain rendering and geometric
algorithms to solve problems that specifically arise in the creation of 3D
models and scenes for biological purposes.
Problem 1:
Unlike game or movie models, biological models are generally based upon
sets of 2D images.
For this reason, traditional modeling packages based upon
combining and modifying primitive objects such as cubes or spheres are not
feasible. A new modeling approach,
with contours as the primitive, is needed.
Solution:
The BodyGen system has been specifically designed to deal with contour
data as the basic modeling primitive used to create complex meshes.
A correspondence algorithm used to create groups of contours
and a tiling algorithm used to create meshes based on these contours have been
incorporated into the program.
These features are not found in traditional modeling software packages.
Problem 2:
Due to the need for high accuracy in the creation of models depicting
human anatomy, objects with extremely large numbers of polygons result.
In a movie or game, the exact curve of a character’s nose
may not be important. However, in
anatomical models, every crease and bump must be meticulously modeled. This results in models containing vast
numbers of polygons. To give an
example, a set of models detailing the brain’s structure contains over 800,000
triangles. To interactively view
scenes containing many objects of this nature, a method of managing complexity
is vital. Traditional modeling
applications do not allow the user to interactively control model detail.
Solution: We have incorporated a dynamic level of
detail algorithm into the BodyView program.
This feature allows the user to create and interact with
scenes involving highly complex models by reducing the level of detail in areas
that are not of interest, while maintaining accuracy in areas that require
greater detail.
Problem
3: In scenes involving anatomy, it is often desirable to view a specific object
in the context of the entire human body.
Unlike movie or game models, biological scenes, especially
those in textbooks, use hand-drawn figures mixing several different drawing
styles to draw attention to areas of importance. Traditional modeling and scene generating packages do not
allow the user to mix several rendering styles together to achieve this effect.
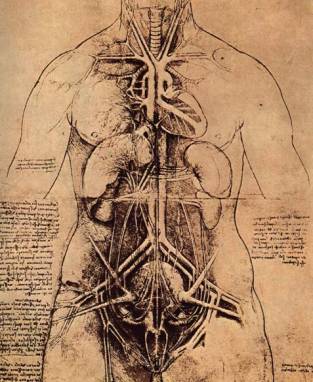
Figure
1.2: A sketch of the human stomach by Da Vinci
Solution: We have incorporated two hand-drawn
rendering algorithms along with the traditional smooth-shaded rendering
MeshView’s display technology.
Renaissance artist Leonardo Da Vinci often drew detailed
sketches of human organs encased within a very roughly drawn human form to give
the anatomical models a context. (see Figure 1.2) This approach gives the user freedom to create a context for
the organs of interest in a low-detail, hand drawn style, while still rendering
the desired objects in a realistic and highly-detailed fashion.
1.3 Chapter Overview
Chapter
2 presents the first half of our software suite, the BodyGen program, and
describes in detail the algorithms involved. Specifically the correspondence and tiling algorithms
required to deal with the image contours touched upon in Problem 1 above are
described and demonstrated in the context of creating biological models. Chapter 3 describes the second half of
our set of tools, BodyView. In
this chapter the algorithms involving mesh decimation, or dynamic
multiresolution, and hand-drawn rendering algorithms touched upon in problems 2
and 3 will be discussed. Finally,
Chapter 4 summarizes our work and explores areas for further research.
Chapter 2
BodyGen
2.1 Overview
Planar
contour data describing the outlines of organs in the human body have become
easily obtainable in recent years.
Examples of data that can be used to create these contours include the
Visible Human Project[21], ultrasound, and magnetic resonance imaging
(MRI). Through image segmentation
techniques and hand tracing, accurate polygonal contours defining organs of the
human body may be obtained from these data. Utilizing this contour information in the semi-automatic
construction of complex surfaces is a vital step in creating highly accurate 3D
models of the human body.
The
goal of BodyGen lies in comparing existing techniques for the creation of these
surface models from contour data, choosing the most promising methods, and
integrating them together into an easy-to-use package that will be freely
distributed. By utilizing this
software, biologists from around the world will be able to generate
three-dimensional models describing organs; these may be combined to create a
freely available, highly accurate model of the human body.
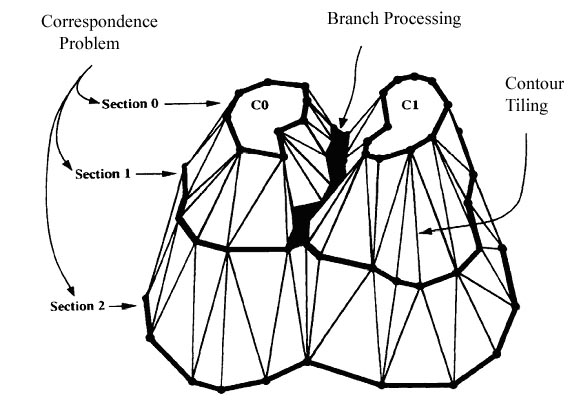
Figure 2.1: Illustration of the model creation process
2.2 Architecture
The
construction of three-dimensional models from contour data can be broken into
the following four steps
1.
Contour
Specification
2.
Contour
Correspondence
3.
Contour
Tiling
4.
Branch
Processing
BodyGen
has been modularized to handle these sub-problems separately so that new
techniques can be easily interchanged with the existing methods. The user may also solve these problems
by hand, bypassing the automatic techniques entirely. A visual representation of these problems can be seen in
Figure 2.1.
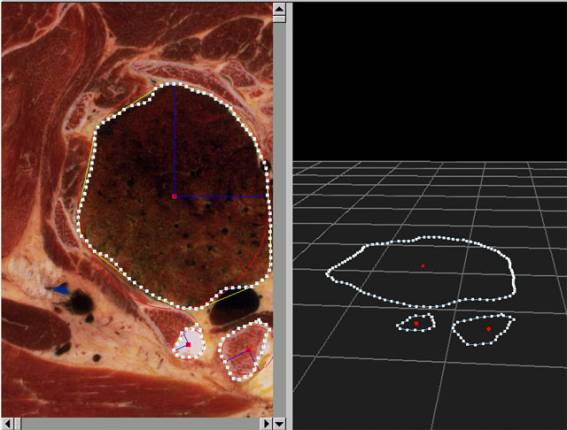
Figure 2.2: A screenshot from BodyGen illustrating contour drawing
2.3 Contour Specification
The
contour data utilized by BodyGen is based upon a set of images. Each image is considered as a planar
surface separated from the previous and next layer by a constant distance. The first step therefore lies in
determining the position and boundaries of organs of interest in the
image. Due to the complexity of
biological images, manual contour specification is currently the method of
choice for defining contour placement in these images. Figure 2.2 illustrates the creation of
contours specifying portions of the lung and two secondary organs in a single
image.
2.4
Contour Correspondence
Once
a set of contours in each image has been determined, it becomes necessary to
determine which of these contours specify individual models. The goal of the Contour Correspondence
step of BodyGen lies in automatically determining a set of contours, which
when combined, form an anatomical model.
2.4.1 Previous Work
The
first work in this area by Soroka [20] used contour overlap between level i and
level i+1 to determine the correspondence in contours between neighboring
levels. Bresler et al. [4] fitted
generalized ellipses to each contour, then used these ellipses to create
generalized cylinders based upon the contours. They define the “best correspondence” by the generalized
cylinder that possesses the smallest deviation from a perfectly linear generalized
cylinder, or a cylinder whose axis defines a perfectly straight line. This approach, however does not take
into account similarity of shape between neighboring ellipses, and does not
work well for contours whose shape is not well approximated by an ellipse.
The most recent advance in Correspondence and the method
used in this project is a Graph-Based Technique. Skinner [6] and Shelley[19] attempted to solve the
correspondence problem by redefining it as a shortest-path graph problem. In this method, for each contour in
level i and level i+1, a best-fit ellipse is found. Next a 5-tuple is determined for each
ellipse. This 5-tuple is defined
as (xc,yc,q,a,b), where xc
and yc are defined as the coordinates of the best-fit ellipse’s
center, a and b are 2d scaling vectors defining the best-fit ellipse’s major
and minor axes, respectively.
Finally, q represents the deviation of the major
and minor axes from the vertical position. A graph is then created between every contour in level i
and every contour in level i+1, where the weight of the edge between
contour A and contour B is equal to the Euclidian distance between the 5-tuples
describing the fitted ellipse of each contour. The correspondence between the contours in level i
and level i+1 is then determined by finding the minimum spanning path
through this graph. The links
between the contours on the same level are discarded, after which, the links in
this minimum spanning tree connecting level i, from level i+1 define
contour correspondence.
2.4.2 Implementation
In
our implementation of the Correspondence problem, we have utilized a modified
version of Skinner’s minimum spanning tree algorithm. However, in our version of this algorithm the edge weight
between two contours A and B is defined as the weighted sum of the Euclidian
distance between the respective 5-tuples of A and B, as defined above, and the
average of the percent of area overlapped between the projection of contour A
onto contour B and conversely B onto A.
In this way the methods of Skinner and Soroka are combined to give
improved results.
Stated more succinctly, the weight between Contour A and
Contour B is defined as follows:
WAB = xD + yO
where:
x + y = 1
D = Euclidian distance between 5-tupleA
and 5-tupleB
O = 2/(Overlap(A,B) + Overlap(B,A)
)
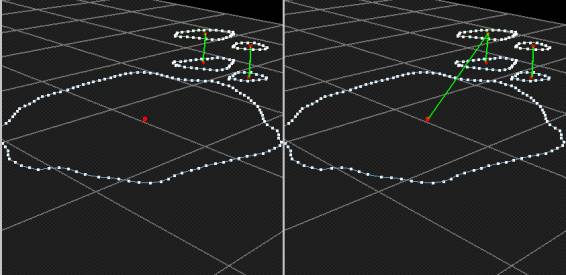
Figure
2.3: (L) Implemented
algorithm (R)
Original Skinner algorithm
The
scaling factors, x and y, are determined for each contour pair
individually as follows:
x = (Overlap(A,Ellipse(A) ) + Overlap(B,Ellipse(B))
/ 2
y = 1 – x
In
this way, when the ellipse represents a good fit to the contour, the similarity
in ellipse shape and position in the 5-tuple is used as the matching
parameter. Conversely, when the
ellipse is unable to capture the contour shape, we rely mainly on overlap to
determine correspondence. A second
deviation from Skinner’s algorithm lies in the requirement we make of the
minimum cost spanning tree.
Skinner required that all nodes be visited at least once in the
correspondence mapping. As can be
seen in Figure 2.3, this will automatically create branches in cases where the
number of contours in plane i differs from that of i+1. We have found that in complex scenes
the algorithm fails to correctly identify branching points, requiring user
interaction to correct the mistakes.
For this reason, we require that the minimum path only pass through each
contour of the plane containing fewer contours. This eliminates any need to predict contour branching and
entrusts this task to the user.
2.5 Contour Tiling
The
tiling step composes the core of BodyGen.
Stated briefly, the goal of this stage is to create a triangulation,
referred to as a ribbon, between a single contour present in image plane i
and a single contour in image plane i+1 such that each vertex of the two
contours is present in two of the triangles which compose the ribbon. Our criteria for determining a “good”
tiling method relies on the following criteria:
1.
The
method must be able to create tilings for contours that differ drastically in
shape.
2.
In
the field of biology, high precision will often be desired. This will result in high vertex counts,
and, as a result, our tiling method must be fast even for complex contours.
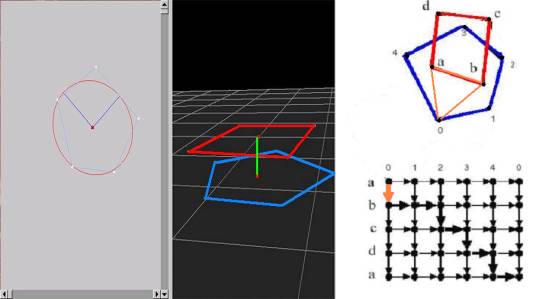
Figure 2.4: A tiling algorithm example, Pt. 1
2.5.1 Previous Work
The
bulk of previous work in the area of contour tiling focuses on optimization
based approaches. The first
optimization-based approach was proposed by Keppel [13]. In this method, a two-dimensional graph
is created from the vertices of each contour as can be seen in Figure 2.4. The vertices of the upper contour,
composed of vertices <a,b,c,d>, define the rows of this graph, while the
vertices of the lower contour, composed of vertices <0,1,2,3,4>, defines
the columns. Figure 2.4
illustrates this situation.
In
the graph of Figure 2.4, each edge defines a single triangle between the upper and
lower contour. This triangle’s
vertices are defined by the unique row and column numbers in the graph edge
coordinates. As an example, the
edge (0,a) to (0,b) would define a triangle defined by vertices 0, a, and
b. Finally, the weight of each
edge is determined by the area of the triangle that it specifies. weights, a tiling is found by
determining the lowest cost path from the upper left to bottom
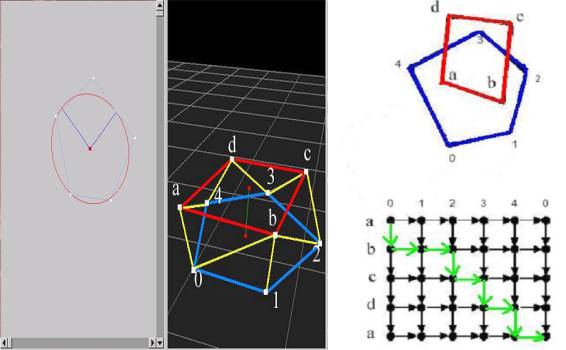
Figure 2.5: A tiling algorithm example, Pt. 2
right
corner of the grid. This process
is illustrated in Figure 2.5.
However,
the main drawback of this approach lies in its slow speed, O(a2+b2)
for a pair of contours with a and b vertices respectively. Fuchs et al. [8] improved upon this
algorithm by employing a Divide-and-Conquer style algorithm to increase the
optimization speed. Their approach
reduced the running time of the algorithm to O( ab log (max(a,b))
).
The
research of Meyers et al. [14] first introduced multiresolution into the tiling
problem. Their approach utilized a
multi-resolution method to reduce the optimization time even further. Stated briefly, a wavelet filter is
passed over each contour until the contour has been reduced to a predetermined
number of vertices. Fuchs’
algorithm is then performed on this simplified contour to create a mesh based
upon the simplified contours.
Finally, detail is added back to the simplified contours, with local
optimization performed when each vertex is added, until, the original contours
are achieved. The overall running
time for this algorithm is equivalent to:
O(m2 log m) + O(max(a,b) log
max((a,b)) )
where, m=# of vertices at the lowest resolution
The
first term of this equation simply represents the running-time of Fuchs
algorithm for the simplified contour.
The running time to add a single vertex and perform local-optimizations
is equal to log(n), which must be performed for each contour vertex that
had been removed by the simplification process. This results in the O(a
log n) term as seen above, where a represents the total number of
vertices removed during the simplification process and n represents the total
number of vertices in the model.
The
most recent development in the area of contour tiling is from Barequet and
Wolfers. [3] In this research a
linear time algorithm is found for tiling two contours with similar shape
characteristics. A method is also
proposed for automatically modifying the contours’ shapes to force these shape
similarities. This is currently
the fastest tiling algorithm available. However, it is not useful in our
application as it requires that the input contours be modified, an unallowable
step as anatomical models’ contours must remain faithful to the original image
data.
2.5.2 Implementation
The
method chosen for implementation in BodyGen is a modified version of the Meyers
et al. multi-resolution tiling approach.
This is currently the fastest and
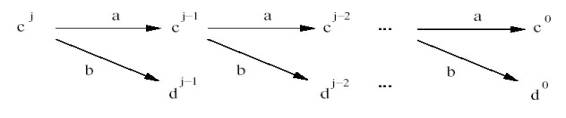
Figure 2.6: A graphical representation of the filter bank
most
accurate tiling algorithm available today for use with unmodified contour
data. The exact procedure is
briefly sketched below, followed by a more detailed section describing each
step and divergences from Meyers’ original method.
1.
Utilizing
wavelet filter banks, find a low-resolution version of the original contour.
2.
Utilizing
the Fuchs algorithm, perform a low-resolution tiling for the simplified
contours.
3.
Replace
removed vertices one at a time, performing local-optimization over the affected
area at each step.
The
first step of this procedure requires the creation of a coarse model that
approximates the original contour.
We follow Meyers’ use of the wavelet filter bank method for this
step. The filter bank method
guarantees that the shape of the low-resolution contour will minimize the
least-squares error between the course and original model. The method works as follows.
At
each step the set of contour vertices cj is multiplied by a
filter kernel and a detail kernel.
As shown in Figure 2.6, this results in two vectors, cj-1 and
dj-1. cj represents the contour vertices at
resolution level j, dj-1 can be thought of as storing
the information necessary to retrieve the more detailed contour data cj
from contour vertices cj-1. A full analysis of the
mathematical properties of wavelets is 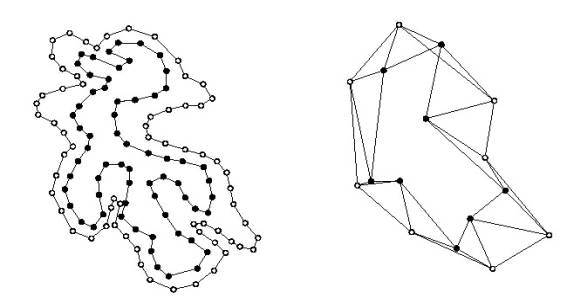
Figure 2.7: Left: Full Contour, Right: Tiled, Coarse Contour
beyond
the scope of this paper. The
reader may find more detailed information on this approach and definitions of
the detail and filter kernels in Chui [5].
Following
the creation of these simplified contours, the Fuchs algorithm is performed to
find an optimal tiling, as shown in Figure 2.7. Our optimization criteria is triangle surface area, giving
rise to tilings possessing minimum surface area. The output of this algorithm is a set of triangles
connecting the two simplified input contours.
The final step in our tiling implementation lies in adding detail
back to the course representations to achieve a tiling of the original
contours. This is achieved by
multiplying the detail vector dj-1 by the inverse detail
kernel, and adding the result to the simplified contour, cj-1.

Figure 2.8: Circles represent newly added vertices.
In short, this step adds one additional vertex per triangle
edge, converting the each triangle to a quad. (see Figure 2.8) For each added vertex, we now have a
choice of changing the triangulation of the newly created quadrilateral by
swapping an edge. This decision is
based upon the same triangle surface area cost function as used in Fuchs
algorithm. When a new level of
detail is added each legal edge swap is performed and it’s change to the
overall cost is determined. If the
swap results in a decrease to the cost function, the swap is performed,
changing the tiling, and all newly legal edge swaps are tested to see how they
modify the cost function. This
procedure is continued until there are no longer any swaps which will lower the
cost function. At this point the
next level of detail is added to the contour and the procedure is
repeated. This continues until we
have returned to the original contours. A screenshot from BodyGen in Figure 2.9, illustrates a
set of initial contours and the resultant tiling.
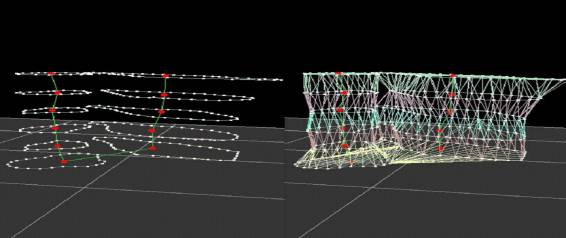
Figure 2.9: A completed tiling
2.6 Contour Branching
There
are many instances in which body structures will branch and perhaps later
re-merge, giving rise to the branching problem. Stated more precisely when the number of contours in image Ia
is not equal to the number of contours in image Ia+1, a
branch has occurred or one or more contours have ended. Our goal is to create visually appealing
tilings in these cases.
2.6.1 Previous Work
The
previous research in this area can be broken into two main areas, that of
composite contour algorithms, and medial axis algorithms. The first use of composite contour
algorithms was by Christiansen and Sederberg [6]. We will use the terms PreBC and PostBC as follows: PreBC
defines the single contour which exists in an image plane previous to the
branch. PostBC defines the set of
contours that exist after the branch has occurred. The approach of Christiansen et al was to combine all
contours in the PostBC set into a single contour by locating the contour pairs
between PostBC of minimal distance and connecting them, thereby creating a
single contour whose shape is loosely defined by the PostBC. Tiling is then performed on these two
single contours as described in the previous section with triangles whose vertices
span two or more contours discarded.
However, there exists one large problem to this approach, the Composite
Contour does not always accurately capture the shape of the set of PostBC
contours, resulting in unappealing tilings. (see Figure 2.10)
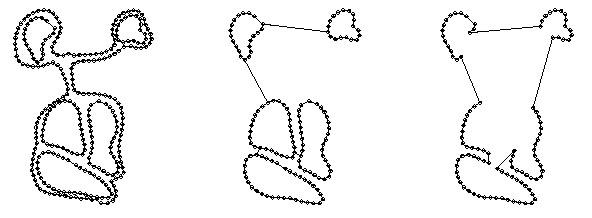
Figure 2.10: Naïve Branching Algorithm Example
Left-The original contour, Center-Closest Points between contours found, Right- The 5 PostBC elements are combined into a single contour.
Meyers [9] proposed a novel scheme for handling branching
contours utilizing the medial axis of the PostBC projected onto the PreBC. The medial axis is a special case of
Voronoi diagrams for surfaces containing holes. Stated succinctly, the medial axis (MA) is defined as the
set of points whose distance from any two points on the Pre or PostBC is
equidistant. The MA is used to
both define a mapping between the PreBC and the PostBC, and create multiple new
PreBC, one for each element in the PostBC set. These pairs of contours are then sent to the tiling engine
for mesh creation. Each point in
the MA is defined by two points on either the PreBC or an element of the PostBC
set. Sections where both points
lie on a PostBC, are used to split the PreBC into a number of contours equal to
the number of contours in the PostBC set.
A simple example will clarify this greatly. In this case there are two contours in the PostBC set.
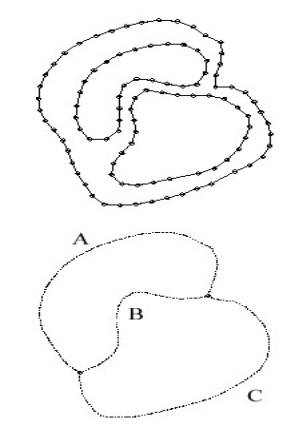
Figure 2.11: Top-Original Contours Bottom-Medial Axis Derivation
The MA for the contours shown above in Figure 2.11 can be
broken into three components, A, B, C. Sections A and C, represents a portion of the
MA that defines a correspondence between the Pre and PostBC. In contrast, section B, is
defined by points from the PostBC elements. Section B is used to split the PreBC into two
contours by finding the vertices closest to the MA branch points, and
connecting them to this section, thereby creating two contours. Sections A and C define
which of the new contours from the PreBC correspond to the PostBC
elements. These pairs of contours
are then input to the tiling engine for meshing, thereby creating a true
branched surface.
The
drawbacks to this method however lie in the extremely slow speed of
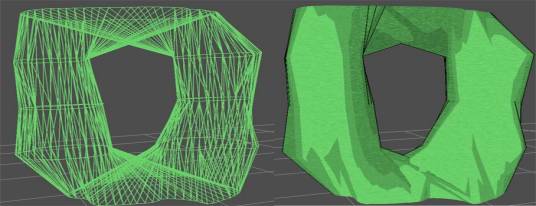
Figure 2.12: Branching Implementation Example
the
medial axis derivation. This
algorithm runs in O(n4) time and takes approximately 16 minutes to
create the medial axis for a contour composed of 904 vertices on a PIII 500Mhz
processor, making this approach unfeasible for interactive applications.
2.6.2 Implementation
While
producing visually pleasing results, the lack of interactivity prompted us to
abandon Meyers scheme for producing branching surfaces and utilize a much
simpler approach. Our current
approach to the branching problem makes use of the observation that in many
cases the separation between image planes is very small, meaning that the
impact of any one ribbon is nearly insignificant in the visual appearance of
the entire structure. For this
reason, we solve the branching problem by independently finding tilings between
each pair of contours in the pre and post branch contour set and displaying
these overlapping tilings to the user.
This approach results in an unnatural cross-section when the models are
cut.
However,
the technique is fast and the external appearance is quite acceptable. (see Figure 2.12)
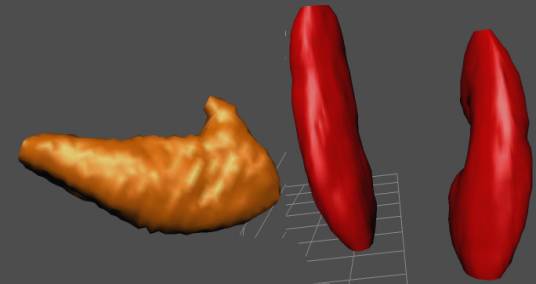
Figure 2.13: Right-Gall Bladder, Left-Left and Right Kidneys
2.7 Results
In this section we will discuss the actual usage of the BodyGen software and show examples of actual anatomical models created using the system. For the purpose of testing our software on real users and beginning the process of creating detailed anatomical models of the human body, two part-time users have been employed. These test-users have created ten detailed anatomical models based upon the Visible Human data set using the BodyGen software exclusively. These models include the human spleen, lungs (r and l), kidneys (r and l), gall bladder, radias ulna (r and l), and left clavicle (r and l). The average creation time for a model was largely dependent on the size and complexity of the model contours; the average time was three hours per model. The most complex of these models were the right and left human lungs due to their large size. Composed of over 200 images, the lung models required approximately six hours to create. Figures 2.13, 2.14, and 2.15 depict a sampling of the final anatomical structures created with the BodyGen program.
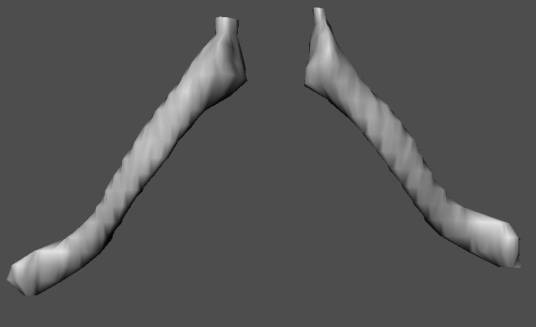
Figure 2.14: Left and Right Clavicle
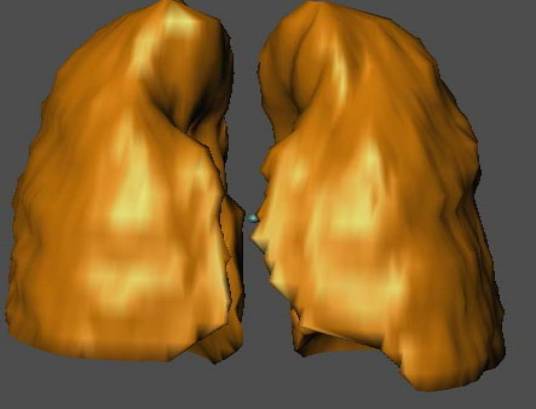
Figure 2.15 Right and Left Lungs
Chapter 3
BodyView
The
goal of the BodyView program is to allow biologists to quickly and efficiently
create complex scenes of the human body involving numerous models of the human
body. We will first discuss the
overall architecture of the BodyView system, then look more closely at the
dynamic multiresolution and non photo-realistic (NPR) rendering
algorithms.
3.1
Overview
Scene
generation programs are not at all uncommon in the computer graphics field. SGI’s OpenGL Inventor[18] was the first
scene description program, allowing users to position, texture, and shade
imported polygonal objects. The
scene description file format for Inventor became the basis for the VRML[22]
description language, currently the most widely used scene description
langauge. Numerous 3D modeling
packages, such as Maya and 3D Studio Max, have also advanced the area of scene
description by including higher level primitives such as subdivision and NURB
surfaces to the primitive object types, as well as including rigid-body
dynamics to simulate the motion of the objects present within the scene. All of these previous efforts, however,
have large drawbacks when being used with biological models.
Beginning with the Inventor and VRML based scene-creator
tools, an immediate problem that arises is the lack of functionality needed to
manage the complexity of present biological models. These programs allow users to modify the exterior properties
of a model, such as texture placement, and interior properties such as vertex
positions. However, they provide
no capabilities for dynamically and automatically creating simplified versions
of a model. For example,
individual vertices of a brain model composed of two hundred thousand polygons
could be modified. However, an
accurate version of the model containing only five thousand vertices would
require tremendous manual effort, requiring the user to delete and reposition
countless vertices. In modern
rendering packages, such as Maya, the reverse problem occurs. The functionality needed to create scenes
as well as reduce and restore detail in models is present, however the user is overwhelmed
by the functionality present in the program, and must spend many weeks learning
the tool. In addition, these
modern tools are designed purely for the scene creator, e.g. artists who wish
to create scenes that will be viewed in a movie or game. For the novice user who desires only to
view and manipulate scenes at the basic level, they are prohibitively expensive
and complex. Finally, all current
scene description programs lack rendering options that include hand-drawn
styles.
The BodyView program was
created specifically to fill a gap present in current scene description
programs. Our goal was to create a
program usable both by anatomists,
to create complex scenes involving detail anatomical models, and by students
who would wish not to create scenes, but to view and interact with those
already created. To manage the
complexity involved in anatomical models, we have incorporated an easy-to-use
level of detail interface for the user, allowing
a
scene creator to display an object with only as much geometrical information as
is needed, as well as two hand-drawn rendering algorithms, which allows a user
to create contrast and emphasis to a scene as he or she sees fit.
3.2
Architecture
As
with any 3D scene authoring tool the basic data structure in our program
involves a collection of 3D objects, which the user loads in individually as
.obj files, or as pre-created scenes in the form of .vrml files. Once loaded, the user may modify the
position, orientation and grouping of the objects, as well as initially set the
model’s level of detail and rendering style. (See figure 3.1.)
Once a model is loaded, the rendering options are set via a
drop down box. These options include Wireframe, Smooth Shading, Hand-Drawn
1, and Hand-Drawn 2.
The specifics of our hand-drawn styles will be discussed in a later
section. The model’s level of
detail is set through a discretized slider bar. The bar is divided into ten
regions, n1-n10, each representing a model containing 10% fewer polygons than
the last. For example, n10
represents a model containing 100% of the original model’s polygons, whereas n4
represents a model containing 40% of the polygons from the original. These properties may be modified at any
time for any model.
In addition, we have implemented a group-level properties
command allowing the user to modify the rendering style or level-of-detail for
an entire group. Each model imported
into BodyView is a member of a user-determined group. By selecting the Group Properties option, the user may raise
or lower the level of detail, or set a rendering option for all members present
in the group at one time. This functionality
is useful for both the scene creator and the student, as it allows the user to
quickly highlight an area of interest.
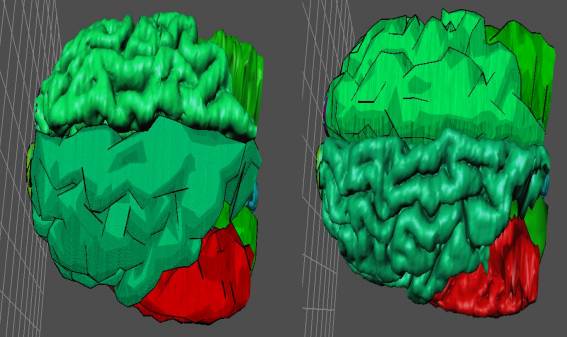
Figure 3.2: Modifying Group Properties
For example, if a student had finished studying the right
brain and was prepared to move into a study of the left brain’s anatomy, he or
she could quickly scale down the detail for all members of the right half and
set its rendering style to hand-drawn. This would provide a low resolution and
non-distracting reference for the brain study. The student could then raise the resolution of the left
brain models to full-detail and change its render setting to smooth, which
would allow for a detailed view of the brain’s workings. (See figure 3.2)
3.3 Multiresolution
In
this section we will explore previous work in the area of level-of detail as
well as examine the multiresolution algorithm used in the BodyView program.
3.3.1 Previous Work
Level
of detail control or mesh decimation is not a new area in computer
graphics. The simplest and most
straight-forward approach, that of discrete multiresolution [9], has been in
use since 1993. In this approach
an artist creates multiple versions of a single model at varying levels of
detail using a 3D modeling tool such as Maya or 3D Studio Max. At run time, the program will then
decide which of these pre-built models to use based on user-input or current
frame-rate. This technique does
not require any algorithmic manipulation of the model’s geometry, as the artist
has already supplied the necessary low-resolution models. The rendering engine must simply choose
which version of the model to display at a given frame. Although this is the simplest solution
to the multi-resolution problem, serious drawbacks are present in the realm of
anatomical modeling. Using this technique,
an artist must manually create low-resolution models for every object used, a
daunting task when dealing with the thousands of structures in the human
body. Additionally, each model
version must be stored in memory, a prohibitively expensive task when dealing
with models which may reach millions of polygons, equating to tens of megabytes
in size.
A second approach is that of wavelet analysis [7,11]. In this approach, each surface is
constructed using a wavelet basis, e.g. each vertex position is specified by
the summation of a series of Fourier cosine functions. The mesh is then decimated to the desired
level of detail using signal processing methods. This method can produce highly accurate low-resolution
models. However, as stated
previously the surface must be reconstructed, or remeshed to meet certain
restrictions before the wavelet analysis may continue. This approach modifies and introduces
error into the highest level of detail in our model, making it less than ideal
for biological models that have been painstakingly created with every polygon
in the correct location. In
addition, the wavelet representation is also unable to faithfully preserve
sharp corners at lower levels of detail.
The final method of multiresolution, and the one used in our
work, involves the use of cost functions and edge contraction. [10, 12, 15] In
this technique, a cost function evaluates the effect of removing each vertex
from the mesh. Two vertices
containing the lowest cost functions, in other words, two adjacent vertices
whose removal would modify the mesh’s structure the smallest amount, are chosen
from a pool of candidates. The
edge formed by these two vertices is then collapsed by taking the two chosen
vertices and moving both to an average position, typically removing two
triangle faces per operation. This
group of algorithms work by iteratively selecting edges for deletion,
collapsing the edge and modifying the resulting model’s edge connections
accordingly. The main difference in
these algorithms lies in the selection of a cost function or how the particular
edge to be contracted is chosen. Although these methods are generally less accurate than
wavelet algorithms, they are faster and can work directly with the original
model’s mesh.
3.3.2 Implementation
This
brings us to the level-of-detail method present in the BodyView software. We have chosen to implement the
level-of-detail (LOD) described by Garland and Heckbert [18]. This algorithm is of the cost function
variety and for reasons stated above is the best fit for our anatomical
models. In this section we will
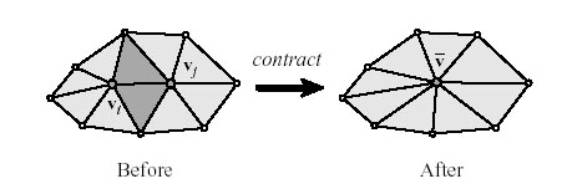
Figure 3.3: Example of edge contraction.
outline
the exact procedure by which our low resolution models are created using this
technique.
As
described previously, this method works by continually selecting optimal
vertices for removal at each step.
It is a “greedy” algorithm as it is concerned only with the optimal
vertices at the current step of the algorithm and not how the collapse of the
associated edge affects previous or future choices. The flow of the algorithm is as follows (See Figure 3.3):
1.
Compute
the value of the cost function for each connected vertex pair in the model
(this step is costly and performed only once)
2.
Select
a pair of candidate vertices.
3.
Contract
this pair of vertices (vi,vj) by the following
method:
a.
Average
the positions of vi and vj and create a new
vertex ![]() in that
position.
in that
position.
b.
Update
the edge connectivity of all triangles previously connected to vi and
vj.
c.
Remove
all degenerate triangles. (those with less than 3 unique vertices)
d.
Update
all cost functions that have been modified as a result of this step. (Usually
this is only a small number)
4.
Repeat
1-3 until the desired level of detail is reached.
The final piece of this algorithm is the choice of the cost
function for each vertex. We have
followed Heckbert and Garland by selecting a cost function which measures the
sum of the perturbation of the normals that would result if a vertex were
moved. In the example show in
Figure 3.3, vertices vi and vj each
participate in six triangles in the Before configuration and 7 triangles
in the After configuration .
Our cost function is the sum of the differences between the normal
values of these triangles in the Before and After configurations. For the purpose of speed we represent
the set of cost functions as a min-heap. This data structure allows us to find
the vertices with minimum cost functions in linear time and retrieve them from
the heap in constant time.
3.3.3 Results
Using this approach, we
are able to dynamically compute the removal of up to one hundred thousand
triangles in less that one second.
Figures 3.4, 3.5, and 3.6 illustrate this approach in action.
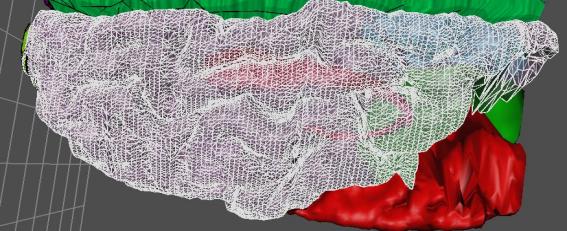
Figure 3.4: Brain model containing 98,123 triangles
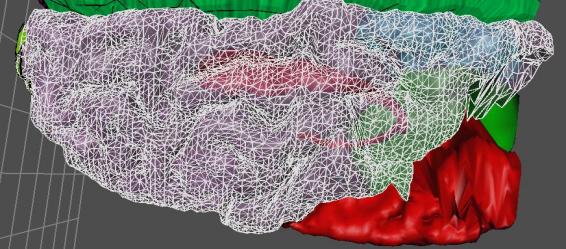
Figure 3.5: Brain Model containing 45,453 triangles

Figure 3.6: Brain Model containing 8,231 triangles
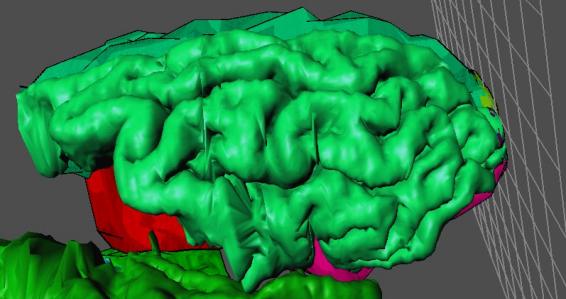
Figure 3.7: High Resolution Smooth Shaded Brain
3.4 Non-Photorealitic
Rendering
A
second major component of our system lies in the ability to perform non-photorealistic
rendering of biological objects.
The advantages of this approach are two-fold. The need for low-resolution models when dealing with scenes
of anatomical objects is a given.
Generally these low resolution models look quite visually unappealing and
not realistic as anatomical objects due to our expectations of what
realistically shaded objects should look like. The NPR style, however, provides a quite visually pleasing
alternative at lower resolutions to the traditional flat-shaded approach. (See
Figure 3.7, 3.8, 3.9)
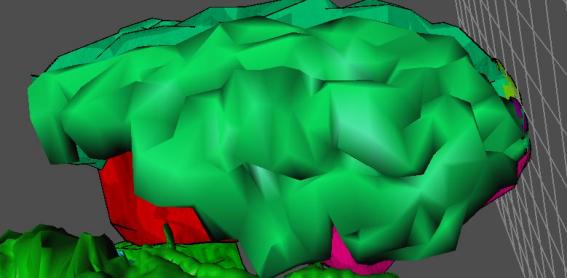
Figure 3.8: Low Resolution Smooth Shaded Brain
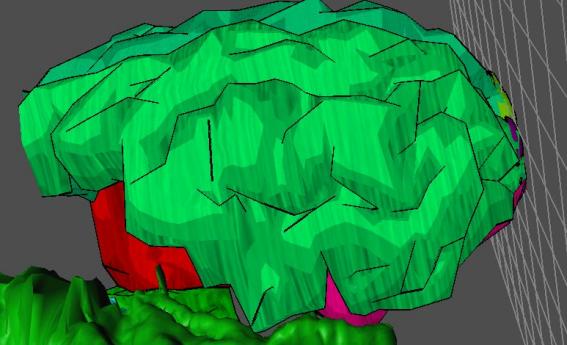
Figure 3.9: Low Resolution NPR Shaded Brain
The
two main technologies used in conjunction to achieve this effect are
silhouetting and texture blending algorithms.
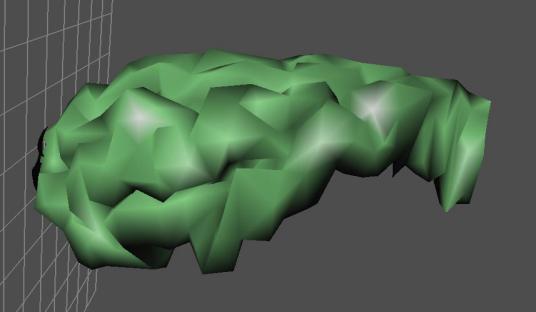
Figure 3.10: Smooth Shaded Brain
3.4.1
Silhouetting
Silhouetting
is a technique used by artists for centuries to create a sense of shape and
texture, while using as few strokes as possible. Ideally, the silhouette of an object should convey all of
the necessary shape and geometry information of an object without the need for
additional shading or texturing.
In our program, an object’s silhouette is made up of two distinct parts,
depicted in Figure 3.11 and 3.12 on the following page. Figure 3.10, showing the basic
flat-shaded object, is given for reference. The first section of the silhouette is composed of a set of lines
describing the boundary of the object when projected into the 2D viewing
plane. The second set of lines is
composed of the set of triangle edges shared between two or more triangles
whose surface normal values differ greatly. The first component of the silhouette, or boundary lines,
describes the rough shape of the object, while the finer geometry information
is conveyed by the second component, detail lines.
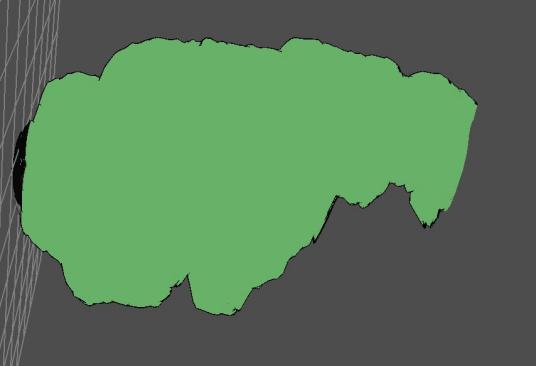
Figure 3.11: Brain boundary lines
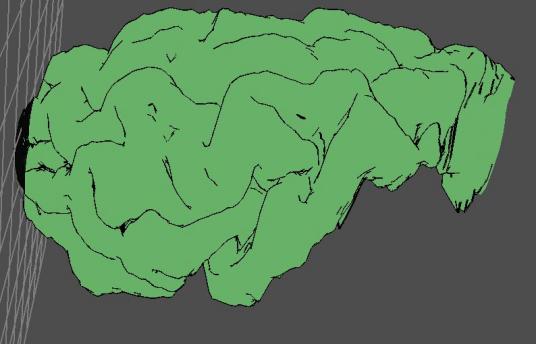
Figure 3.12: Brain silhouette - boundary lines + detail lines
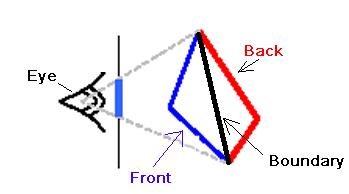
Figure 3.13: Graphical depiction of boundary line detection.
In the detection of these boundary lines, we use Zhang’s
Backface Culling algorithm [23].
Expressed mathematically, the boundary lines of the silhouette are found
by locating all triangle edges in which one triangle sharing that edge is front
facing (facing the camera), and one triangle is back-facing. This can be expressed mathematically
as:

where
N1 and N2 are the 3D normal vectors of the
front and back facing polygons respectively, V represents one of the
vertices from the selected edge and E represents the camera, or eye,
position. When we have detected an
edge that satisfies this property, we redraw it using a dark line to distinctly
display the silhouette. This
concept is illustrated graphically in Figure 3.13 above.
To generate the detail lines of the silhouette, we use an
algorithm conceived by Raskar and Cohen [17]. This algorithm operates by finding the set of edges shared
by two triangles whose surface normal angle varies by more than a predetermined
constant, in this case, 45 degrees.
A large variation in normal 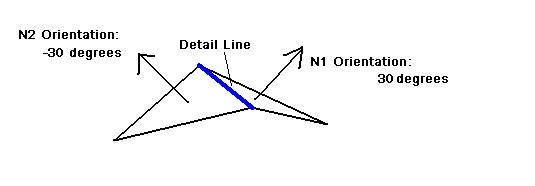
Figure 3.14: Detail Line Detection
orientation
between two triangles indicates a rough or uneven section of the model.
As
the purpose of the detail lines is to represent this type of geometric
information,
we draw edges with this property in the same bold style as the boundary
lines. (see Figure 3.14)
3.4.2 Multi-texture Hatching
Now
that we have rendered the geometry in a hand-drawn style, the next goal in the
creation of a hand-drawn rendering style is to artistically recreate the
interplay of light and shadow on our objects. The technology used to achieve this hand-drawn effect is
multi-texturing, a technique in which two individual textures are blended via
an alpha map to create a final texture which is then pasted to an object. We leverage this technology to create
an alternative drawing style to realistically smooth shading. When drawing rough sketches of objects,
artists often use the convention known as hatching to simplistically illustrate
light and shadow. The two main
techniques in this approach are binary and discrete hatching. In the binary case, hatching is used
when an object is in shadow and not used when in light. The discrete case is slightly more
complicated and uses 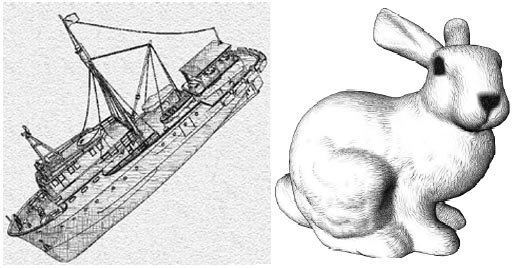
Figure 3.15: Left-Discrete Hatching, Right-Binary Hatching
hatching
density to create the illusion of shadow.
Areas not touched by light are denoted by a dense hatching pattern,
while those in light are depicted using a light hatching pattern. (see Figure 3.15).
This
technique of multi-texturing to achieve this aritistic effect was first used by
Lake et al, followed shortly by Hoppe et al. [16, 25]. In an interactive program such as
BodyView, speed and responsiveness in manipulation of the models is an
important goal. Due to its fast rendering speed on modern hardware, we have
chosen to implement the multi-textured hatching algorithm put forth by Lake et.
al. to achieve our non-photorealistic effect. We explain the details of this algorithm and show examples produced
by our program below.
The Lake hatching algorithm mimics the continuous technique
described above to depict light and dark areas on the model. First, a texture map representing each
level of hatching is loaded. The
BodyView application uses 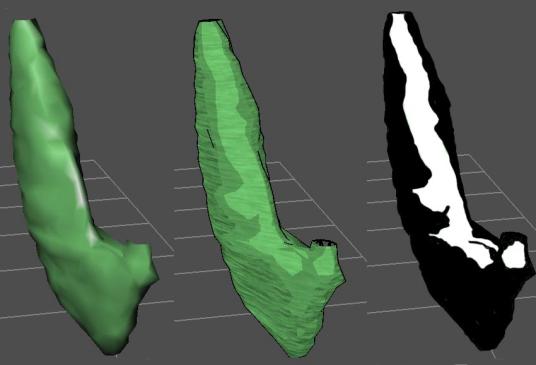
Figure 3.16: Multitexture Hatching Example
Left-Original Smooth Shading, Center-Hand-Drawn Rendering,
Right-Alpha Map for Texture Two (Alpha=1-White, 0-Black)
two
texture maps for the sake of speed as this is currently the optimal number for
most current graphics hardware pipelines.
Next, an alpha map is created based upon the lighting of the
model at each frame in the following manner. (see Figure 3.16)
The dot product between the light vector and the normal for each
triangle in a model varies continuously between 0 and 1. Values less than 0 represent
back-facing polygons and are not included. This value is used to determine the alpha value of each
texture for that vertex using a thresholding approach. Vertices with a light dot product less
than .5 are assigned an alpha value of 0 for texture one and an alpha value of
1 for texture two. Vertices with
dot products between .5 and 1 are conversely assigned 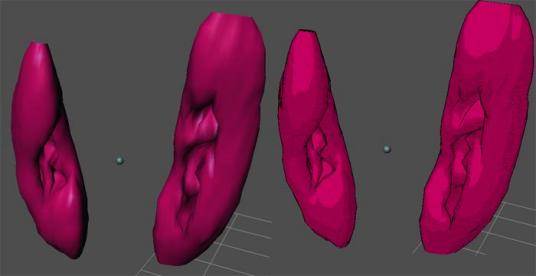
Figure 3.17: Left-Smooth Shaded Kidneys, Right-NPR Kidneys
an
alpha value of 1 for texture one and 0 for texture two.
The light dot product value is used as an indicator to
essentially turn on and off individual textures for each vertex. From an artistic standpoint this is the
correct approach, as we would like to use different hatching to represent light
(high light dot-products) and dark (low dot-products) areas. For neighboring vertices with differing
alpha values, we linearly interpolate the alpha value across the triangle edge
in the same fashion as Phong shading.
To illustrate this technique on real data, the human kidneys, created
with the BodyGen application, are depicted below in both a smooth and
hand-drawn style. (see Figure 3.17)
Chapter 4
Future
Work and Conclusions
4.1 Conclusions
We have developed a robust package for semi-automatically
creating three-dimensional models
from images slices and subsequently creating complex scenes using these
models. The BodyGen and BodyView
programs implement and combine the following existing key technologies to
achieve this goal:
-Tiling of piecewise linear contours (BodyGen)
We have implemented a modified version of Meyers’ multi-resolution
tiling algorithm to create triangulations between two piecewise linear
contours. This technology allows
us to quickly create three-dimensional anatomical models based upon a set of
user-specified contours.
-Contour Correspondence Algorithm (BodyGen)
We have developed a new version of the correspondence
algorithm, taking into account the accuracy with which best-fit ellipses match
the original contours’ geometry when correspondence predictions are made. This algorithm is used to automatically
predict which sets of contours should be triangulated using the above tiling
algorithm to create an anatomical model.
-Multiresolution Meshes (BodyView)
We have implemented a version of Garland’s
cost-function-based multiresolution mesh-generation algorithm to automatically
create simplified yet accurate versions of complex anatomical models. At run-time, the user is able to create
these simplified meshes in real-time based upon the requirements of the current
scene and the available processor speed.
-Non-Photorealistic Rendering (BodyView)
We have implemented a NPR rendering scheme based upon Lake’s
hatching algorithm. This feature
allows the user to modify the display characteristic of individual anatomical
models at run-time. This technology
can be used in conjunction with the above multiresolution meshes to create a
contrast between low detail background models, added to a scene to create
context, and high detail foreground models, those which are the topic of study
or inspection in a given scene.
It is the hope of the author that this program will be of
use to biologists in the future as we work towards accurately digitizing and
viewing the human form.
4.2 Future Work: BodyGen
4.1.1 Medial axis generation
Meyers
utilization of the medial axis would be much more attractive if interactivity
could be obtained while using this method for branch handling. For this to become possible, additional
computational geometry research involving the efficiency of algorithms for
generating the medial axis of polygons containing holes will be necessary.
4.1.2 Image Segmentation of Contours
Currently,
one of the most tedious areas of the BodyGen program is the generation of
contours. The user must draw each
contour by hand and manually modify the contour vertices to accurately reflect
the image data. Adding automatic
image segmentation to this process would greatly simplify the user’s task.
4.2 Future Work: BodyView
4.2.1 Soft Body Physics Simulation of Surfaces
After
three-dimensional surfaces have been generated, the next step is interaction
with these images. The BodyView
program allows users to name, orient and change the viewing properties of
anatomical models. However, in
areas such as surgical simulation, a more holistic interaction is
necessary. For these type of
applications users will need to poke, prod, and cut anatomical models, making
the use of soft-body physical simulation a necessity.
4.2.2 Adaptive Multiresolution Meshes
Currently
the program user is responsible for specifying the detail level for each
anatomical model. Creating an
automatic metric to modify the detail level of individual models based upon
criteria such as polygon count, render time, and processor speed to maintain a
constant frame rate regardless of viewing angle or scene composition would
increase the ease-of-use of the BodyView application.
BIBILIOGRAPHY
[1] 3D Studio
Max. http://www.discreet.com/.
[2]
Alias-Wavefront Maya. Maya. http://www.aliaswavefront.com/.
[3] G. Barequet
and B. Wolfers. Optimizing a strip separating two polygons. In
Graphical
Models and Image Processing. 60(3):214-221, May 1998.
[4] Y. Bresler,
J.A. Fessler, and A. Macovski. A Bayseian approach to
reconstruction from
incomplete projections of a multiple object 3d doman.
In
IEEE Trans. Pat. Anal. Mach.
Intell., 11(8):840-858, August 1989.
[5] C. K.
Chui. An Introduction to Wavelets.
Academic Press, Inc.,1992.
[6] H.N.
Christiansen and T.W. Sederberg.
Conversion of complex contour line
definitions into
polygonal element mosaics. In Proc. SIGGRAPH, pages
187-192, 1978.
[7] M. Eck, T.
DeRose, T. Duchamp, H. Hoppe, T. Lounsbery, W. Stuetzle.
Multiresolution Analysis of Arbitrary Meshes. In Proc. SIGGRAPH, pages
173-182, 1995.
[8] H. Fuchs,
Z.M. Kedem, and S.P. Uselton. Optimal surface reconstruction
from planar contours. In Communications
of the ACM, 20(10):693-702,
October 1977.
[9] T. A.
Funkhouser and C. H. Sequin.
Adaptive Display Algorithm for
interactive frame rates during visualization of complex virtual
environments.
In
Proc. SIGGRAPH, pages 527-534, 1993.
[10] M. Garland
and P. S. Heckbert. Surface
Simplification using quadric error
metrics. In Proc.
SIGGRAPH, pages 209-216, 1997.
[11] S. Gortler
and M. S. Cohen. Variational
Modeling with Wavelets.
Technical Report CS-TR-156-94, Dept. of Computer Science, Princeton
University, 1994.
[12] H. Hoppe,
T. DeRose, T. Duchamp, J. McDonald, and W. Stuetzle. Mesh
Optimization. In Proc.
SIGGRAPH, pages 19-26, 1993.
[13] E.
Keppel. Approximating complex
surfaces by triangulation of contour
lines. IBM J. Res. Develop., 19:2-11, January 1975.
[14] D. Meyers,
S. Skinner, and K. Sloan. Surfaces
from contours. In ACM
Transactions On Graphics, 11(3):228-258, July
1992.
[15] J. Popovic
and H. Hoppe. Progressive
Simplical Complexes. In Proc.
SIGGRAPH, pages 217-224, 1997.
[16] E. Praun,
H. Hoppe, M. Webb, and A. Finkelstein.
Real-time Hatching .
In Proc. SIGGRAPH, pages 581-586, 2001.
[17] R. Raskar
and M. Cohen. Image Precision
silhouette edges. In Proc.
ACM Sypmposium on Interactive 3D Graphics, pages 135-140, 1999.
[18] SGI OpenGL
Inventor. http://www.sgi.com/software/inventor/.
[19] M.
Shelley. The correspondence
problem: Reconstruction of objects from
contours in parallel sections.
Master’s thesis, Dept. of Computer Science
and Engineering. University of Washington, 1991.
[20] B. I.
Soroka. Generalized cones from serial sections. In Computer
Graphics and Image Processing, 15:154-166, April
1981.
[21] V. Spitzer,
M. Ackerman, A. Scherzinger, and D. Whitlock. The visible
human male: a technical
report. In J Am Med Inform Assoc, 3(2):118-30,
March 1996.
[22]
VRML97 International
Standard. ISO/IEC 14772-1, 1997.
[23] Zhang and
K. Hoff III. Fast backface culling
using normal masks. In
Proc. 1997 Symposium on Interactive 3D Graphics, pages 103-106, April
1997.
Appendix A
BodyGen User’s Manual
This User’s Manual will introduce the novice
user to the large number of user-interface features and commands in
BodyGen. We will detail each of
these features and conclude with a brief tutorial on creating a model from
start to finish using the BodyGen software. We will use the following screenshot
from the BodyGen application as a point of reference when discussing the
available features.
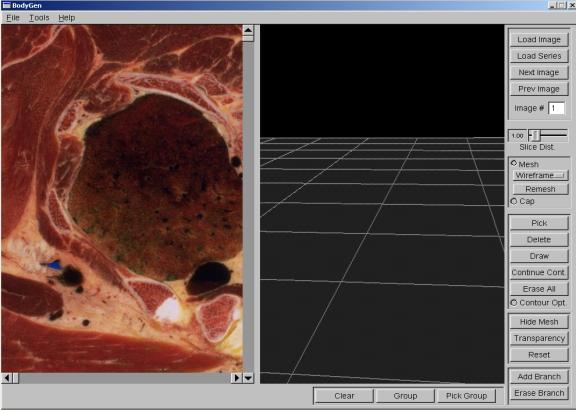
Figure A.1: BodyGen Screenshot
A.1 GUI Button Functionality
- Load
Image
- This option allows the user to load in an image in bitmap format on
which contours can be drawn. Assuming that n images are currently
loaded, the next image will be loaded as image n+1 in the series.
- Load
Series -
This allows the user to automatically load an entire series of
images. Upon selecting this option a menu requesting, Base Filename,
Start Number and End Number will be displayed. The base filename
represents the starting string common to all files in the series, e.g. in
the case of lung1.bmp, lung2.bmp, lung3.bmp, the starting string would be lung.
Start and End Number represent the first and last image number in the
series that the user wishes to load. Continuing the previous
example, if lung1.bmp, lung2.bmp, ..., lung 45.bmp exist, but the user
only wishes to load images 2-10, 2 and 10 would be entered here
respectively. If the entire set is desired, these entries may be left
blank.
- Next/Prev
Image
- These buttons allows the user to cycle through the image planes
currently loaded. As the names implies, Next and Prev Image cycle
the current image up and down, respectively.
- Image
# - This text entry
field allows the user to directly set the current image number.
- Slice
Dist -
This slider allows the user to manually determine the distance between
image planes. For a more accurate method of setting the slice
separation, please see the Tools->Calibration entry.
- Mesh
- This checkbutton
toggles the mesh display in the 3D view. When disabled, only
contours and links will be shown, when enabled, the wireframe mesh for
each ribbon will be displayed. When this button is activated, the
user may choose between Wireframe and Smooth-Shaded using
the drop down box below.
- Cap
- This
checkbutton toggles the display of a cap covering the top and bottom of
each object as a lid.
- Remesh
- During the
course of modifying contour placement, contour vertex position, etc.
ribbons may need to be remeshed. After contour modification,
if the user feels that a mesh need to be modified to better represent the
current contours, pressing this button will re-optimize the modified
meshes.
- Pick
- This button
enables picking in the 2D display. When an object is selected, mouse
clicks in the 2D display will no longer draw contours, but instead select
individual contour vertices. After selecting a contour vertex with
the L mouse button, moving the mouse with the L button depressed will
modify the vertex position. If multiple vertex selection is
required, the user may click with the L button, and with the L button
depressed draw a box around the desired vertices. Clicking on the
red marker representing the center of a contour will automatically select
all vertices of that contour.
- Delete
- This button
(tied to the delete key as a shortcut) will automatically delete all
selected vertices. If all vertices of a contour are selected, it
will also delete the contour itself.
- Draw
- This button
allows the user to exit Pick mode, and return to Draw mode where contours
may be drawn.
- Continue
Cont - This button
allows the user to continue adding vertices to previously completed
contours. First, an entire contour should be selected in Pick Mode,
next Continue Cont should be clicked. This will return the program
to Draw Mode; however the next set of vertices that the user specifies
will be added to the end of the currently selected contour.
- Erase
All - This button
allows the user to erase all contours in the current image plane.
- Contour
Opt - This check
button allows the user to minimize the number of vertices that are drawn,
when a contour is specified. By examining the linearity of the curve
drawn by the user, the program places only the minimum number of vertices
needed to represent that curve. When not checked the program will
place vertices at locations sampled from the curve drawn by the user at
constant intervals.
- Hide
Mesh -
This button operates on contours selected by the user in the 3D
view. When pressed, the meshes associated with selected contours
will not be displayed, even if the program is in Mesh Display Mode.
- Transparency
- Similar to the
Hide Mesh feature, this button operates on contours selected by the user
in the 3D view and when pressed, makes the meshes associated with selected
contours appear as transparent in Smooth Shaded Display Mode.
- Reset
- This option
returns the meshes associated with the selected contours to normal
display, nullifying the effects of the Transparency and Hide Mesh buttons.
- Add
Branch -
This button allows the user to manually add a link between contours on
adjacent levels. After pressing this button, the user should select
(with L mouse button and Alt key depressed) two contours on adjacent
levels by selecting the center point of each contour in the 3D view.
This will automatically add a link between the contours and generate the
appropriate mesh.
- Delete
Branch -
This button allows the user to manually delete a link between contours on
adjacent levels. After pressing this button, the user should select
(with L mouse button and Alt key depressed) two linked contours on
adjacent levels by selecting the center point of each contour in the 3D
view. This will automatically remove the link between the contours,
and delete the corresponding mesh.
- Group
- This button
allows the user to group together multiple mesh ribbons together into a
single group. To group together a set of meshes, select the contours
corresponding to the meshes in the 3D window, next click on Group with the
left mouse button. A window will appear asking for the Group
name. Upon pressing OK, the set of contours selected will become
associated with that name.
- Select
Group -
This button allows the user to quickly select groups of contours created
with the 'Group' button above. Upon pressing this button a box will
appear prompting the user to enter the group name. Pressing OK will
automatically select the group of contours associated with that name.
- Clear
- This button
clears the current selection in the 3D window and also cancels any pending
Add/Erase branch commands.
A.2 Menu Item
Functionality
- File->Save
Model -
This option allows the user to save selected meshes in a .obj formatted
file.
- File->Save
Contours -
This option allows the user to save the current set of contours and
branches to a file. All information pertaining to contour level,
position, and links to contours in adjoining levels will be saved.
- File->Load
Contours
- This option allows the user to load in work saved using the previous
command. Note: Image data must be loaded before performing
this operation.
- Tools->Calibration
- This option allows the user to set a
correspondence between the scale of the image and the distance between
image slices. The user is asked to draw a line on the image of a
pre-specified length. This is used to determine the correspondence
between pixels and mm. in the image. Upon selecting this option, the
user will be presented with a menu requesting Draw Length and Slice
Separation distance. Draw length is the distance represented by a
line drawn by the user. Slice Separation Distance represents the
distance between each pair of adjacent image slices.
A.3 Mouse Functionality
The mouse in the BodyGen application performs a number of
different tasks depending on the current mode and window selection.
- 2D Contour Window
(Draw Mode)
L Mouse Button – When depressed, BodyGen will begin to draw a contour. To outline a contour, move the mouse around the body of the desired contour with the left mouse button depressed. When contour is completed, releasing the L button will end the drawing of the current contour.
M, R Mouse Buttons – Not Used
- 2D Contour Window
(Pick Mode)
L Mouse Button – If a contour centroid point (red circle in center of contour) is not selected, one vertex of a selection rectangle will be specified by clicking and holding the L mouse button. Dragging the mouse with the L button depressed will outline this selection rectangle. When the L button is released, all vertices within this selection rectangle will be selected, and can be deleted using the Delete GUI button. If clicking and holding w/ the L mouse button selects a contour centroid, all vertices of the chosen contour will be selected. Motion with the L button depressed will now move the entire contour.
M,R Mouse Buttons – Not Used
- 3D Contour Window
(All Modes)
L Mouse Button – Motion of the mouse with the L button depressed will rotate the camera.
M Mouse Button – Motion of the mouse with
the M button depressed will translate the camera.
R Mouse Button – Motion of the mouse with
the M button depressed will scale the camera.
L Mouse Button + Alt – Left clicking on a
contour centroid with the Alt key depressed will select all contours connected
to the contour associated with the centroid.
L Mouse Button + Alt + Shift – Left clicking on a
contour centriod with the Alt and Shift keys depressed will select the single
contour associated with the centroid.
Appendix B
BodyView
User’s Manual
This User’s Manual will introduce the novice user to the
large number of user-interface features and commands in BodyView. We will detail each of these features
and conclude with a brief tutorial on creating a scene from start to finish
using the BodyView software. We
will use the following screenshot from the BodyView application as a point of
reference when discussing the available features.
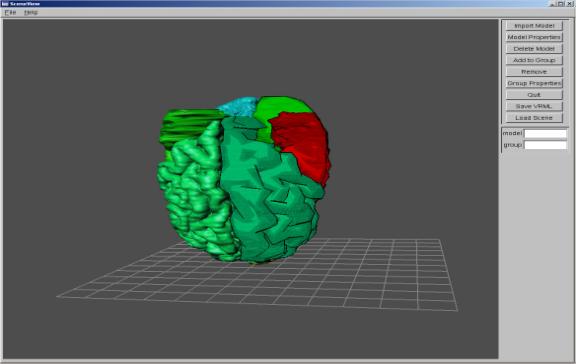
Figure B.1: BodyView Screenshot
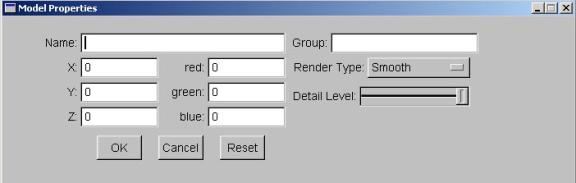
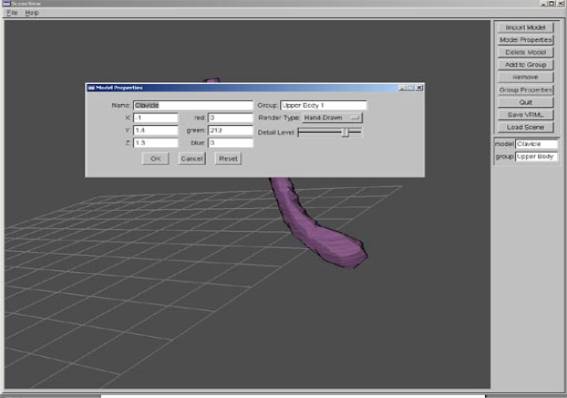
Figure B.2: Model Properties Dialog Box
B.1 GUI Button Functionality
- Import
Model -
This button allows the user to load in a model in .obj format. Upon loading a model, the Model
Properties dialog box (see Figure B.2) will appear, allowing the user to
set model specific properties.
- Model
Properties – This
button will display the Properties Box for the selected model. The Model Properties contain the
following fields:
- Name
– Records the name
of an object.
- Group
– Records the
group in which the object will be placed.
- X,Y,Z
– Records the
X,Y, and Z translation which will be applied to the object.
- Red,Green,Blue
– Records the R,
G, and B color components for the model within the range 0-255. The model will be displayed in
this color.
- Render
Type –
Selects the Render Style for the current object.
Wireframe displays only the edges of the triangles composing the model. Smooth displays the object in the standard Phong shading style. Hand-Drawn1 will display the object using the multi-texture hatching NPR rendering method. This rendering scheme resembles a watercolor or oil painting. Hand-Drawn 2 will display only the silhouette lines of the object. This rendering scheme resembles a hand-drawn sketch of the object. - Detail
Level – This
slider selects the detail level for the current object. The far left position represent
the coarsest detail level while the far right position represents the
full detail original model.
Selecting positions between these two extremes allows the user to
fine tune the detail level of the object.
- Reset
– This button will
return the X,Y, and Z translation parameters to 0.
- Delete
Model –
This button deletes the currently selected model from the scene.
- Group
Properties – This
button brings up the Group properties dialog box identical to the Model
Properties dialog box described above except in one important respect;
these properties act on all members of the specified group. For example, if Brain1 is entered in
the Group field, and Hand-Draw 1 is selected, all rendering properties of
the members of the Brain1 group will be changed to Hand-Drawn 1.
- Quit
– This button exits
the BodyView program.
- Save
VRML – This button
saves the current scene, as well as rendering and detail properties for
each object, in VRML format.
- Load
Scene – This
button allows the user to load a previously saved VRML file.
B.2 Mouse Functionality
The mouse serves both to manipulate the camera and
reposition objects in the BodyView application.
L Mouse Button – Motion of the mouse with
the L button depressed will rotate the camera.
M Mouse Button – Motion of the mouse with
the M button depressed will translate the camera.
R Mouse Button – Motion of the mouse with
the M button depressed will scale the camera.
L Mouse Button + Shift
(no object selected) – Clicking on an object with the L mouse button with the
Shift key depressed will select that object. A selected object will turn transparent purple, with a large
white sphere present inside. (Note: the object’s rending property must
be either Wireframe or Smooth for the object to become
transparent.)
L Mouse Button + Shift
(object selected) – Once an object is selected, clicking on the white
manipulation sphere visible at the object’s center then moving the mouse will
translate the object in the X, Z plane.
M Mouse Button + Shift
(object selected) – Once an object is selected, clicking on the white manipulation
sphere visible at the object’s center then moving the mouse will translate the
object in the Y, Z plane. An
object may be deselected by clicking away from the object with the L or M mouse
button while the Shift key is depressed.